
Makeblock Education Robot mBot Ranger MAK132
Doporučené nabídky (1)
Makeblock Education Robot mBot Ranger MAK132
Nejlevnější nabídky (1)
Makeblock Education Robot mBot Ranger MAK132
Popis produktu
Parametry produktu
Recenze
Makeblock Education Robot mBot Ranger MAK132
- Cena, výkon, dostupné senzory na trhu.
, zakoupeno v Hwkitchen.cz
Doporučuje produkt
Parametry produktu
Popis produktu
Robot se třemi tvářemi
Robot kit mBot Ranger nabízí tři různé možnosti sestavení: robotický tank, tříkolové vozítko a samobalanční dvoukolka. Pro všechny tři typy vozítek jsou připravené programy. Vytvořené roboty můžete ovládat a programovat pomocí mobilu, tabletu nebo počítače.
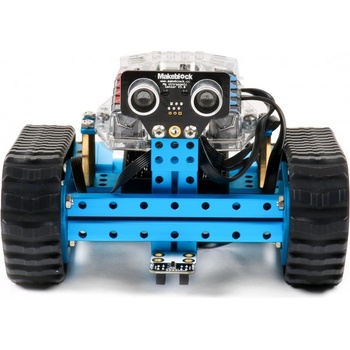
Off-road robot tank
Off-road tank miluje překážky! Ať to jsou kostky a knížky ve vašem pokoji nebo překážky venku, tento robot si s tím poradí. Je uzpůsobený na překonávání terénu, kde ostatním vozítkům už začínají podkluzovat kolečka a docházejí síly.
Mrštný Raptor - tříkolka
Přestavějte Off-road tank na mrštnou tříkolku! Ranger tříkolka je vozítko, které je ze všech tří možností stavebnice mBot Ranger nejrychlejší. Postavte ho na START a vyražte! nervní pták - dvoukolka
Tento Arduino robot je tak trochu zvláštní. Samobalanční dvoukolka totiž vypadá a jezdí jako nějaký nervózní pták :). Elektronika a program robota drží balanc a pták se tak udrží podobně jakou segway pouze na dvou kolech. O stabilitu se starají akcelerometr a gyro senzor.
Výkonná Arduino deska
Jakmile si s vozítky dostatečně pohrajete, můžete se pustit do vlastního tvoření. Sestavování částí pomocí šroubků a matek i samotné programování v grafickém prostředí je velice jednoduché. V případě, že vám dojdou nápady, můžete se nechat inspirovat množstvím projektů dostupných online.
Hlavní deska Me Auriga je založená na Arduino Mega 2560. Přímo na desce je pět senzorů. Kdyby vám to však nestačilo, máte k dispozici deset konektorů, díky kterým můžete robota libovolně rozšířit a to se pak můžou dít věci!
Grafické programování mBot Ranger je možné programovat na počítači v grafickém prostředí mBlock (je česky), založeném na Scratch 2.0. Díky tomuto jednoduchému programování v podobě přetahování grafických funkčních bloků, můžou robota programovat velice snadno i děti.
Programujte na tabletu
Kromě programování na počítači je možné tvořit také na iPadu nebo tabletech s Androidem v aplikaci Makeblock. Můžete se inspirovat nabídkou existujících projektů, nebo vytvořit své vlastní.
Pohodlné ovládání
Aplikace Makeblock vám umožní ovládat robota bezdrátově (s vlastním nebo již existujícím projektem). Zmáčkněte tlačítko a začněte s robotem objevovat okolí!
Online kurz zdarma
Pro zjednodušení práce začátečníkům je dostupný online kurz (viz níže), který v šestnácti kapitolách vysvětluje jednotlivá zákoutí grafického programování s mBot Ranger. Účastníci kurzu mohou plnit jednotlivé úkoly a učit se tak programovat krok za krokem.
Žádné pájení
Všechny moduly v kitu jsou vybaveny konektory RJ25. Propojování se základní deskou je velmi jednoduché a zvládne ho opravdu každý. Díky těmto konektorům není nutné nic pájet, takže zapojení zvládnou i malé děti. Konektory jsou označeny barvou, takže budete vždy vědět, jestli je máte zapojené do správné zdířky.
Postavte cokoliv
Komponenty mBot ranger jsou plně kompatibilní s dalšími výrobky firmy Makeblock. Celá produktová sada čítá přes 400 částí. Možnosti sestavení jsou prakticky neomezené.
Napájení robota
V balení robota mBot najdete držák na 6 tužkových baterií nebo akumulátorů NiMh. Tyto baterie zajišťují napájení robota. Pokud jsou baterie vybité, tak je musíte vyměnit a nebo v případě akumulátorů nabít. V případě slabých nebo téměř vybitých baterií nemusí robot fungovat správně. Pro napájení robota je vhodné použít kvalitní baterie nebo akumulátory s kapacitou alespoň 2000 mAh. mBot Ranger x mBot
Pokud váháte mezi sadou mBot a mBot Ranger, přijde vám vhod následující tabulka. mBot Ranger mBot
Možnosti sestavení 3 1
Řízení
Arduino Mega 2560
Arduino Uno
Rozšiřující porty 10 motor/senzor portů 4 senzor porty
Senzory světelný senzor, ultrazvukový senzor, sledovač čáry,gyroskop, teploměr, zvukový senzor světelný senzor, ultrasonic sensor,sledovač čáry
LED 12 2
PC programování mBlock mBlock iPad/Tablet
Makeblock App
Makeblock App
Aplikace na smartphone
Makeblock App
Makeblock App
Arduino
Ano
Ano
Komunikace
Bluetooth
Bluetooth
Online kurz
Ano
Ano
Součásti mBot Ranger mBot Ranger, Dobrodružství Marka na Marsu
Příručka pro hravou výuku programování vznikla díky spolupráci s učiteli Scratche. K dispozici je šestnáct kapitol o výuce grafického programování s programem Ranger - Markovo dobrodružství na Marsu. Níže si můžete prohlédnout náhled kurzů. Všechny příklady jsou graficky zpracovány pro software mBlock verze 3, ale budou fungovat i s mBlock verze 5.
Kapitola 1 - Začátek
Me Auriga je základní deska vyvinutá společností Makeblock po mCore. Je speciálně navržena pro uživatele, kteří mají rádi otevřené hardwarové produkty Arduino. Me Auriga obsahuje nejen rozšiřující porty pro řízení motorů a senzorů, ale také integruje driver motoru se dvěma enkodéry. Ten umožňuje nastavit rychlost motoru za účelem vytvoření přesnějších aplikací. Tato kapitola vám má pomoci plně porozumět elektronickým modulům a mechanickým součástem použitým v sadě robota mBot Ranger.
Kapitola 2 - Argot
Tato kapitola obsahuje úvod do rozhraní mBlock a příklady, které ukazují, jak programovat s mBlock. Dozvíte se, jak pomocí mBlocku ovládat RGB LED propojením základní desky Me Auriga s počítačem pomocí kabelu USB.
Kapitola 3 - kamarádi
Segway je nový typ vozidla, který využívá gyroskop na svém těle k získávání údajů o poloze. Poté použije algoritmus uložený v mikroprocesoru k analýze dat, a tím k řízení pohybu motoru pro udržení rovnováhy. V této kapitole se naučíme sestavit robota s vlastní rovnováhou, propojit robota s mBlockem, aktualizovat firmware pro robota v mBlocku a zjistíme, jak robot udržuje rovnováhu.
Kapitola 4 - V pohotovostním režimu
Pokud chceme, aby vozidlo s pouze dvěma koly udržovalo rovnováhu, budeme muset přidat vysoce přesné senzory a nastavit složitý algoritmus pro vozidlo. Když však na toto vozidlo přidáme další kolo, bude schopno snadno stát vzpřímeně na podlaze. Prostřednictvím sestavení tříkolového robota představíme body, čáry a roviny. Poté budeme pozorovat, jak tento robot funguje, a naučíme se psát programy pro jeho dálkové ovládání.
Kapitola 5 - Kontakt
Tato kapitola slouží k rozpoznání bzučáku na Me Auriga. Naučíme se, jak pomocí mBlocku přehrát hudební skladbu s Rangerem. Pomocí bzučáku bude Ranger schopen vydávat zvukový signál, přehrávat některé známé písničky a volně vyjadřovat své emoce. Zvuk bzučáku se také může stát malým nástrojem pro ladění programů. Začněme od pěti tónů z filmu Blízká setkání třetího druhu k vytváření vlastní hudby procvičováním bloku "forever" a "repeat...times" v mBlocku.
Kapitola 6 - Světelná energie
Při programování je důležité umět správně vytvářet a používat proměnné. Pomocí proměnných je možné omezit zbytečné odečty čidel a provést pokročilé řízení systému pomocí obsahu proměnných. V této kapitole budeme proměnné používat k ukládání dat světelného senzoru a k interakci s naší roztomilou pandou a kouzelným robotem mBot Ranger.
Kapitola 7 - Mezihvězdná cesta
V minulé kapitole jsme se naučili metodu využití proměnných, zatímco v této kapitole ji musíme aplikovat do nového senzoru - akcelerometru/gyroskopu s integrací naší malé pohádkové postavičky mBlock, abychom úspěšně dokončili všechny naše náročné mise.
Kapitola 8 - Výzva
Konstrukce robota mBot Ranger díky přidání systému enkodéru umožňuje, aby pohyby robota byly přesnější a předvídatelnější. Hlavním obsahem této kapitoly je seznámit vás s tím, jak lze pomocí enkodéru v kombinaci s instrukcemi dosáhnout komplexnějšího ovládání robota.
Kapitola 9 - Sledování
Nejběžnější metodou udržování bezpečného směru jízdy na dané trase je stanovení dráhy, jako je například u nás běžně vídaný vlak nebo vysokorychlostní železnice. Kromě toho existuje také technologie využívající speciální senzory, které umožňují pohyb automobilů po kolejích, na nichž jsou položeny odpovídající materiály. Např. vozidla bez posádky s magnetickou indukcí využívající magnetické siločáry a také vozidla s infračerveným sledováním trati, která se mohou pohybovat buď po trati s bílými, nebo černými čarami. Jedná se o vybavení automobilů v továrnách, které řeší nedostatek pracovních sil. Nyní se naučíme, jak používat modul IR line-follower, který umožní vozidlu Ranger pokračovat v postupu tím, že ho udržuje na černé dráze.
Kapitola 10 - Bariéra
V oblasti robotů obvykle rozhoduje schopnost detekce prostoru a vzdálenosti o tom, zda se stroj může v oblasti bezpečně pohybovat. V této kapitole se naučíme, jak používat ultrazvukový senzor k detekci vzdálenosti a jak pomáhat mBotu Ranger vyhýbat se překážkám, aby mohl procházet bezpečnou cestou.
Kapitola 11 - Prach
V této kapitole přidáme do programu koncept (proporcionálního řízení). Rozdíl mezi cílovou hodnotou a naměřenou hodnotou senzoru využíváme k přiblížení nebo oddálení vhodného poměru pro řízení pohybu robota. V porovnání s metodou použití hodnoty větší nebo menší než pevně stanovená hodnota úsudku může tento přístup udržet systém stabilnější a omezit nadměrné korekce. V této kapitole opět použijeme gyroskop. Ke změně řídicího výstupu však použijeme přímo hodnotu získanou ze snímače. Například pomocí otočných grafů nebo změnou směru postupu mBot Ranger.
Kapitola 12 - Navádění
V této kapitole představíme aplikaci robota s duálním světelným senzorem a světelným následováním. Ranger má dva vestavěné světelné senzory. Využitím rozdílu detekce světelného senzoru může Ranger určit, kde se nachází zdroj světla. Poté sleduje zdroj světla a pohybuje se dál. Můžeme si vzít do ruky svítilnu, která navádí robota Ranger k postupu a zatáčení, čímž se z něj stává robot sledující světlo.
Kapitola 13 - Heslo
V této kapitole se naučíme, jak použít zvukové senzory Rangera. Změnu hlasitosti zvuku zjistíme porovnáním hodnoty hlasitosti zvukových senzorů. Zvukový senzor můžeme použít jako jednoduchý spínač k ovládání LED světla a motorů Rangera, čímž z něj uděláme hlasově ovládané vozidlo.
Kapitola 14 - Rozhodování
Při provádění úlohy, je třeba pečlivě zvážit posouzení podmínky s prioritou. V této kapitole zjistíme, jak se vyhnout překážkám, a to nejen při sledování linie. Je důležitější udržet se na čáře nebo se vyhnout kolizi? Různé myšlenky vedou k různým programům. A teď si to pojďme vyzkoušet!
Kapitola 15 - težkosti
Naučíme se, jak pomocí senzoru sledování čáry zjistit hranici podlahy. Díky němu Ranger nepřekročí hranici. Místo toho při setkání s hranicí couvne a provede zatáčku. Mezitím musíme využít ultrazvukový senzor k vyhledávání objektů, nárazu do nich a dokončení úkolu.
Kapitola 16 - Dárek 12 tříbarevných RGB LED světel umístěných na základní desce Rangeru Me Auriga, která jsou uspořádána do kruhu. Co se týče těchto LED světel, je třeba je správně použít. Tato kapitola popisuje, jak používat 12 LED světel na Me Auriga. Koordinuje proměnné a matematické výpočty pro vytvoření různých světelných efektů.
Všechny příklady jsou graficky zpracovány pro software mBlock verze 3, nicméně s mBlock verze 5 budou také fungovat.
Poznámka: V balení robota není 6 ks akumulátorů AA. Pro napájení se hodí akumulátory s kapacitou nejméně 2000 mAh. mBot Ranger Odkazy
Návod na sestavení a použití mBot Ranger
Grafické prostředí mBlock - software
Tutoriály na programování s mBot
Podívejte se, kde můžete produkt koupit:
Chybí či je nepravdivý některý důležitý parametr? Uvedené informace jsou pouze orientační, před zakoupením ve vybraném obchodě doporučujeme ověřit, že prodávaný model má klíčové vlastnosti dle vašich požadavků. I když se snažíme o maximální přesnost informací, bohužel nemůžeme zaručit jejich 100% správnost. Ceny produktů jsou uváděny včetně DPH.
Hodnocení produktu
Makeblock Education Robot mBot Ranger MAK132
- Cena, výkon, dostupné senzory na trhu.
, zakoupeno v Hwkitchen.cz
Doporučuje produkt